研究背景
付着パッドから粘着駅を分泌
アリは足先にあるパッドから
液滴を出し,その表面張力を
利用して壁面に付着している
この原理を利用したパッドを
MEMS
を用いて製作し,
壁面歩行ロボットを実現する.
MEMS技術を用いた付着パッド
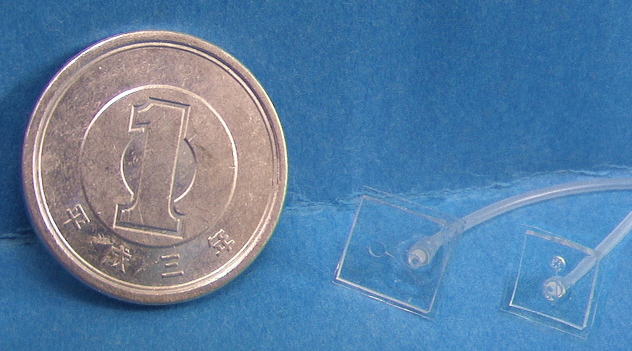
製作した付着パッド
M
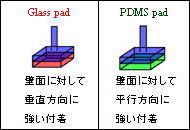
EMSにより、液滴付着を再現したガラスパッドと 柔軟付着により摩擦を利用し推進力を得る
PDMSパッドを製作した.それぞれのパッドには
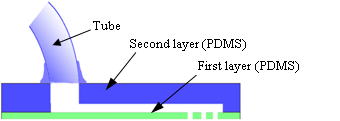
液滴を分泌できるよう細かな流路を形成してある.
付着パッド
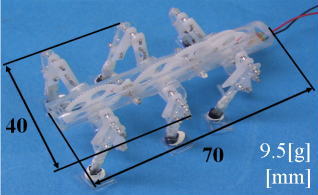
壁面歩行ロボット
壁面歩行ロボットのシミュレーション
壁面歩行ロボット
壁面歩行に成功
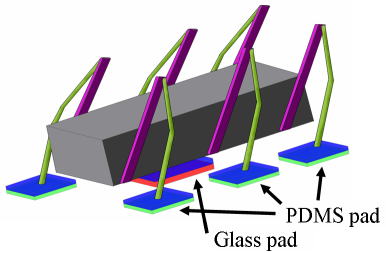
壁面歩行
ロボットは,
アリの交互
3
脚歩行を
規範とし
て
製作した.
そして腹部にガラスパッド,
各脚に
PDMS
パッドを搭載することで,
平滑なガラス面において
垂直壁面と,天井面の歩行に成功した.
天井面歩行に成功