研究背景
本研究では,チョウを規範とした小型羽ばたき飛翔ロボットの製作を行なう.近年,ジェット機やヘリコプターなど,様々な飛行様式が実用化されている.しかし,小型な飛行体は大型飛行体とは異なる飛行理論が要求される為飛行が困難である.小型飛行ロボットは,狭所の探索作業等幅広い活躍が期待される.そこで,自然界において昆虫がはばたきによる飛翔を行っている事に着目し,小型なロボットを飛翔させるには,はばたき飛翔が適していると考える.
クラッピング動作と腹振り
クラッピング
クラッピングとは左右の翅を打ち合わせることである.
その際に羽間に真空が作り出され,左右の翅を引き
剥がす事で大きな負圧の渦が発生する.それが振り
上げ時には推進力に,振り下げ時には上昇力を向上させる
腹振り
チョウは飛翔時に羽ばたき動作と同周期かつ,
逆位相で腹を振る事で体を傾かせ,迎角を制御している.
それにより加速方向を変え上昇力と推進力を発生させている.
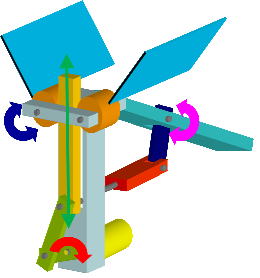
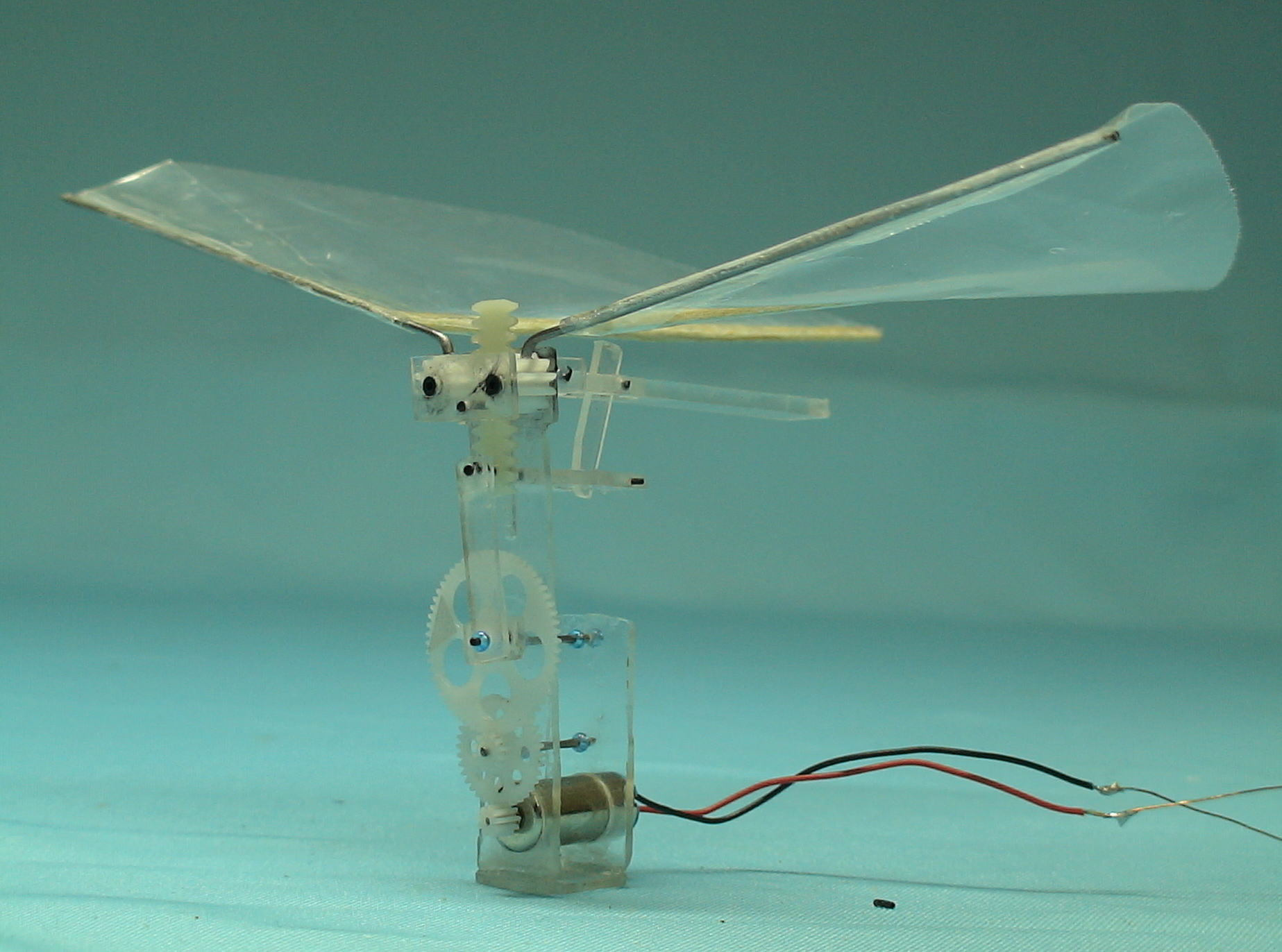
蝶型はばたき飛翔ロボット
チョウ型はばたきロボット
腹振り動作
はばたき動作
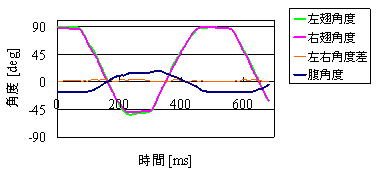
左右の羽ばたき動作の同期が取れ,
腹を振り迎角を変化させている.