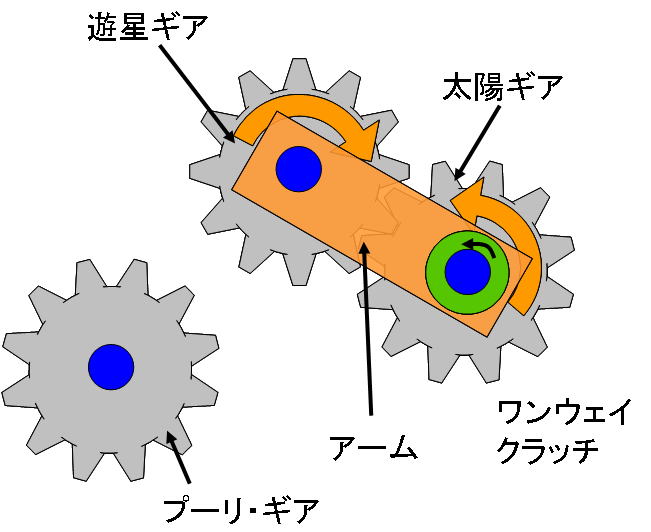
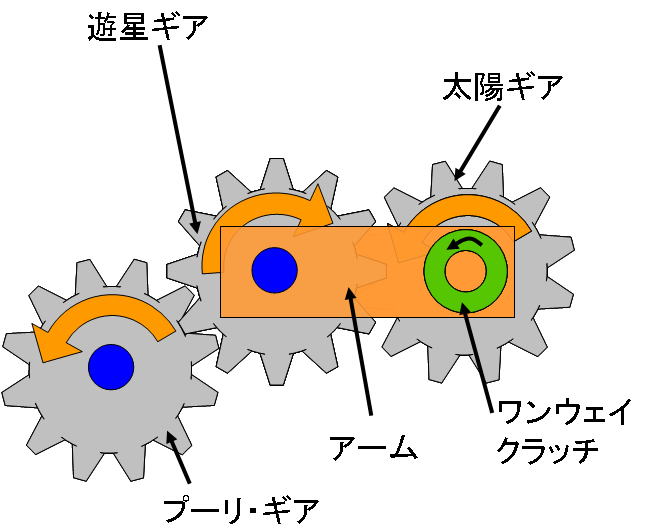
�d�g�݂́C�܂��C���[�^�Ńv�[���[����]�����C�e�O�X���������D�r��������Ɠ����ɁC�˂�L�������G�l���M��~����D���ɁC���[�^�ƃv�[���[���Ȃ��M�A���N���b�`�Ő藣���C�G�l���M�������������s���D�N���b�`�̃M�A���V�����Ԃ̓��������邱�ƂŁC�藣�����s���D
1�̂˂ŕ��s�ƒ�����s�킹��ɂ́C�S�Ă̓���œ������͂��K�v�ɂȂ�C���s�̑f�����������s�킹�邱�Ƃ�����ł���D�����ŁC�˒萔�̈قȂ�2�̂˂�p���C���s���ɂ͎ア�˂��C���ɂ͋����˂�L�k�����邱�Ƃŕ��s�ƒ���𗼗�������D