研究背景
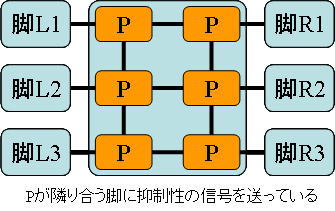
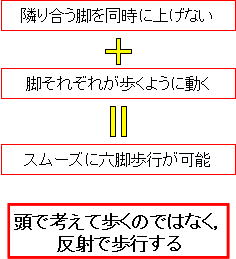
昆虫は片方の脚が上がっているとき,隣り合う脚に抑制性の信号を送ることで,隣り合う脚が同時に上がらないようにしている.
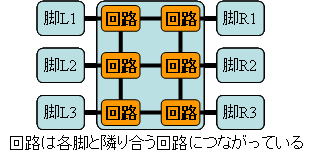
この単純なルールを用いた6脚歩行ロボットを製作した.
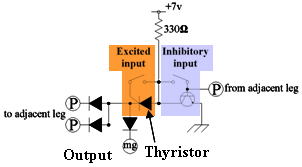
回路の説明
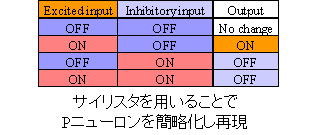
隣り合う脚を制御するための回路.興奮性の信号が入ると脚を上げ(ONになり),抑制性の信号が入るとどのような状態でも脚を下げる(OFFになる).抑制性の信号の方が優先される.
自分の脚を上げているとき,隣り合う脚に抑制性の信号を送ることで,隣り合う脚が同時に上がることがない.
6脚ロボット
アクチュエータ:BMF
脚1本の動き
歩行の様子1
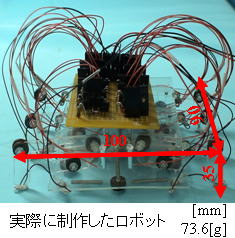
実際に制作したロボット.
BMFという電気を流すと発熱し,その熱によって収縮し,電気を流すのを止め,冷却されると,もとの長さに戻るという性質をもつアクチュエータを用いている.
機構的な不具合により動かない脚があり,6脚での歩行はできなかったが,残りの5脚での歩行には成功.
隣り合う脚は同時にあがらない
歩行の様子2