研究背景
現在,数多くの移動ロボットの研究が行われていますが,その移動様式は,主に陸上移動,空中飛翔,水中遊泳などです.しかし,水面 を移動するロボットに関する研究はまだあまり行われていません.そこで,水面を移動する昆虫である 「アメンボ」に着目しました.アメンボは表面張力で 水面に浮いており,浮力で浮かぶ船とは違う移動様式をしています.その動作や,習性を調査し,水面移動ロボットに活かす研究をしています.
MEMS技術を用いた脚
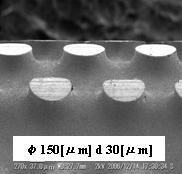
アメンボは脚先の毛と毛に付けた油による表面張力を利用
半導体製造技術を用いてアメンボの脚先を製作
振動を利用した水面移動ロボット
PICを搭載した回路基盤
振動モータ
池での水面移動
ロボットは,振動モーターによって支持脚を共振させ,共振した脚の弾性変形を利用して推進力を得ている.
振動モーターは携帯電話などに使われているモーターを使用している.また,振動の制御にはPICを用いた回路を使用することで様々な動きが可能になっている.