研究背景
現在,数多くの移動ロボットの研究が行われていますが,その移動様式は,主に陸上移動,空中飛翔,水中遊泳などです.しかし,水面 を移動するロボットに関する研究はまだあまり行われていません.そこで,水面を移動する昆虫である 「アメンボ」に着目しました.アメンボは表面張力で 水面に浮いており,浮力で浮かぶ船とは違う移動様式をしています.その動作や,習性を調査し,水面移動ロボットに活かす研究をしています.
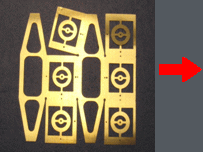
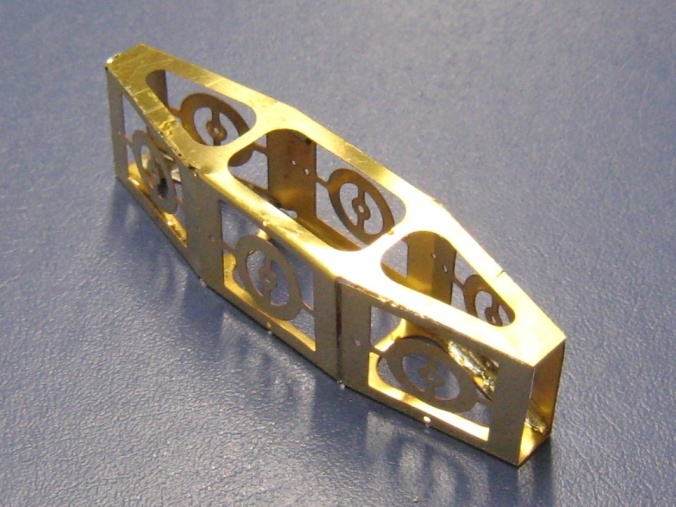
折り紙構造を用いた一体化加工
脚の駆動には,電流を流すと収縮する繊維状のものを採用し,
胴体は一体化成型にするため,MEMS技術を用いて折り紙構造を採用した.
表面張力表面張力を利用した水面移動ロボット
水面移動
陸地移動