
 HOME
HOME メンバー
メンバー Link
Link Sponsorship
Sponsorship小型レスキューロボットの開発
背景
2011年3月11日,日本の東北地方において世界最大級の大震災「東日本大震災」が発生した.日本はレスキューロボットの研究が盛んであり,この震災では,福島第一原子力発電所事故における原子炉建屋内の探索などで,実際にレスキューロボットが活動した.しかし,レスキューロボットにおいて最も期待されている要救助者の探索を目的としたレスキュー活動は行われなかった.
地震などの災害で被災地は広大な範囲となり,さらに要救助者の生存率は72時間で大きく低下してしまう.その条件の中で要救助者を探索し救助するためには,複数のロボットによって同時多発的に探索活動を行うことが有効であると考えられる.よって本研究は,大量生産可能なハード・半自動的に探索できるソフト・複数のロボットが相互連携できるネットワークを持った要救助者探索レスキューロボットの開発を行う.
ロボットの構造
(1)多脚リンク
多脚リンクは,DCモータ1つを用いて昆虫の脚の動作を模倣できる. Fig.1は脚2本のリンクの簡略図である.この図において,青いリンクはモータが設置されているボディ,赤いリンクはモータの出力が入力される動作リンク,黒いリンクは脚,白い球は球面ペアである.ボディから伸びた球面ペアを動作リンクの内側に置くか,外側に置くかで,脚の地面につくタイミングを変えることができ,これをうまく配置しながら脚を増やすことで,昆虫の歩行を再現することができる.
(2)2重平行リンク
前述した多脚リンクはボディと動作リンクを常に平行に保たなければ,モータの回転を各々の脚に伝達することができない.従って,ボディと動作リンクの間にFig.2に示す2重平行リンクを追加する.この図において,青いリンクはボディ,赤いリンクは動作リンク,緑のリンクは平行リンク,矢印はモータの回転出力である.これにより,ボディと動作リンクは常に平行に保持される.
(3)関節
前述の多脚リンクは旋回機能を持たないため,ロボットはそれらとは別の旋回機構が必要である.そこでロボットを前後2つのユニット(各々のユニットに多脚リンクと2重平行リンクを搭載している)に分割し,その間に関節を設ける.この関節によって,前ユニットを左右に傾けることで旋回,上下に傾けることで障害物乗り越えの補助を行う.関節の左右はサーボモータによって動作し,関節の上下は自由になっており,路面に応じて自由に動作することで,障害物乗り越えをスムーズに行うことができる.
基本特性
制作したロボットをFig.3に示す.サイズは高80×幅130×長300[mm],重量390[g](回路類・バッテリー含む),主な材質はエンジニアリングプラスチック,アクチュエータは駆動用DCモータ2個を比率40.5で減速・旋回用サーボモータ1個である.DCモータはS.T.L.JAPAN社の誉21Sモータを用いる.モータの仕様は定格電圧7.2[V],消費電流70〜6800[mA],定格トルク75[g・cm],回転数24700[rpm]である.実験により確認されたロボットの基本性能をTable1に示す.
(本研究は、平成23年度 財団法人JKA 競輪補助事業の補助により研究をおこなっております。)
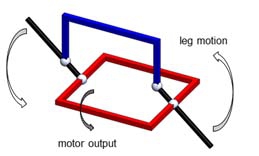 fig.1 fig.1 |
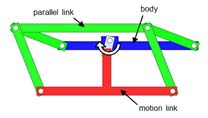 fig.2 fig.2 |
 Fig.3 Fig.3 |
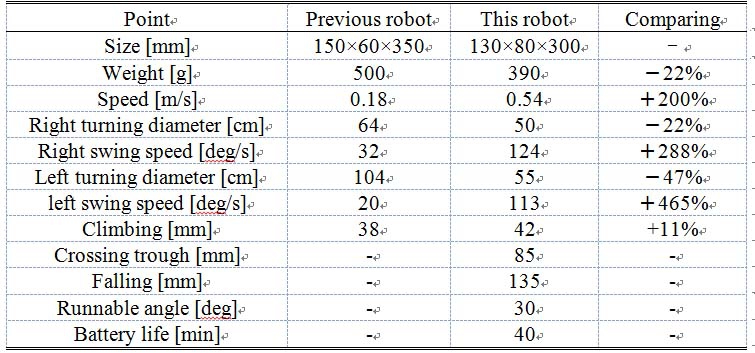 Table1 Table1 | |||||||||||