生物規範型ロボット / Bio-inspired Robots
水面移動ロボット / Water-walking Robots
アメンボを規範として、表面張力によって水面に浮き、様々な駆動方式により水面上を移動するロボットを開発しています。
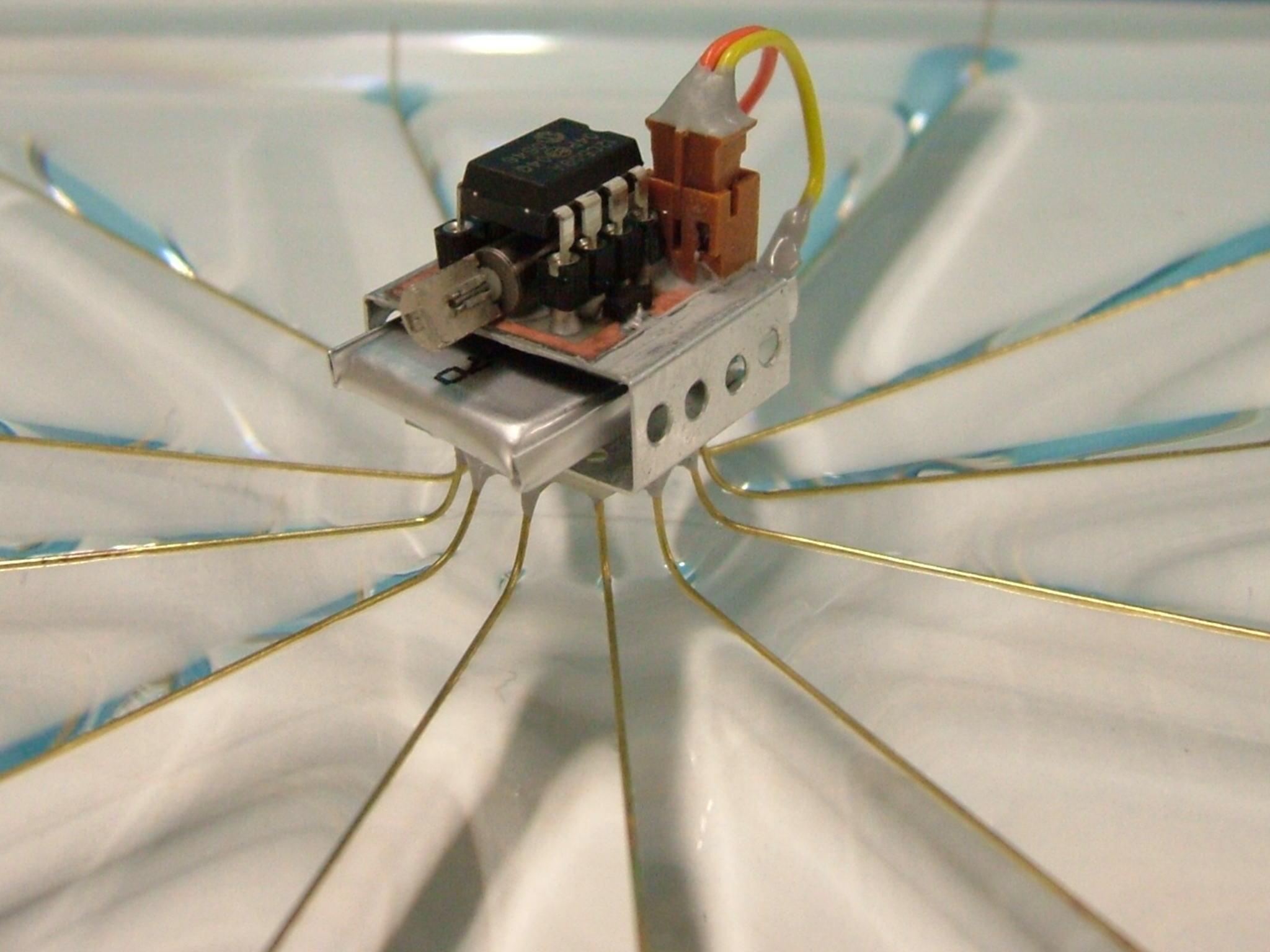
- 振動型水面移動ロボット / Vibration-driven Water-walking Robot 【Video】
- 脚型水面移動ロボット / Six-legged Water-walking Robot 【video】
- プロペラ型水面移動ロボット / Propeller-driven Water-walking Robot【Video】
壁面移動ロボット / Wall Climbing Robots
昆虫の付着機構を規範として、液滴の表面張力を利用して付着し、脚や車輪を利用して平滑な壁面や天井面を移動するロボットを開発しています。また昆虫の爪を規範として粗い壁面を移動可能なロボットも製作しています。
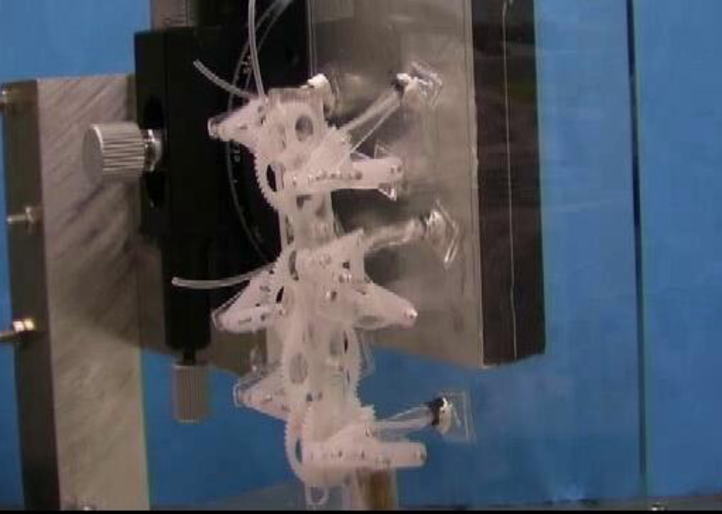
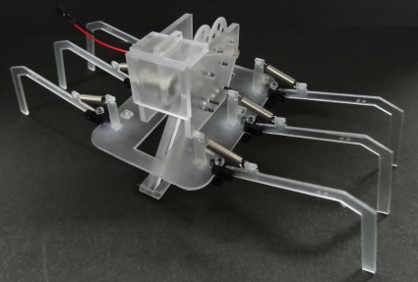
- 脚型壁面歩行ロボット / Hexapedal Wall Climbing Robot【Video】
- 車輪型壁面移動ロボット / Wheeled Wall Climbing Robot 【Video】
- 爪を利用した壁面移動ロボット / Wall Climbing Robot with Spines
はばたき飛翔ロボット / Flapping-wing Flying Robots

昆虫やハチドリを規範として、バッテリーとモータを搭載した小型軽量の自立型はたばき飛翔ロボットを開発しています。
- トンボ型はばたき飛翔ロボット / Dragonfly-inspired Flapping-wing Robot【Video】
- チョウ型はばたき飛翔ロボット / Butterfly-inspired Flapping-wing Robot
- ハチドリ型はばたき飛翔ロボット / Hummingbird-inspired Flapping-wing Robot 【Video】
歩行・跳躍ロボット / Walking-Jumping Robots
歩行と跳躍機能を兼ね備え、不整地での移動や段差の乗り越えどが可能な走破性の高い小型移動ロボットを製作しています.
微細構造による機能性表面 / Microstructured Functional Surfaces
EWODを利用した液滴操作 / Droplet Manipulation Using Electro-Wetting on Dielectric (EWOD)

基板上に配置した電極への電圧印加により液滴の挙動を制御するエレクトロウェッティング技術を利用して、液滴の輸送、分割、排出などを行うマイクロデバイスを開発しています。
- EWODによる水滴の回転 / Droplet Rotation Using EWOD【Video】
- EWODによる水滴の分割 / Droplet Separaion Using EWOD 【Video】
微細構造による濡れ性の制御 / Wettability Control on Microsturctured Surfaces
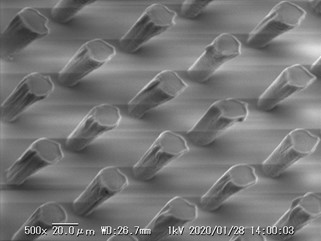
昆虫の表面の微細構造などを規範として、超撥水・撥油表面や、濡れや摩擦の異方性を持つ表面などを開発しています。