筋骨格下肢シミュレータ
筋骨下肢シミュレータを用いた日常動作における人工関節の耐力学特性の解明
本研究はJKA(競輪補助)のサポートにより行われました。
補助事業による成果物
事業報告書
|
 |
筋骨格カシシミュレータ
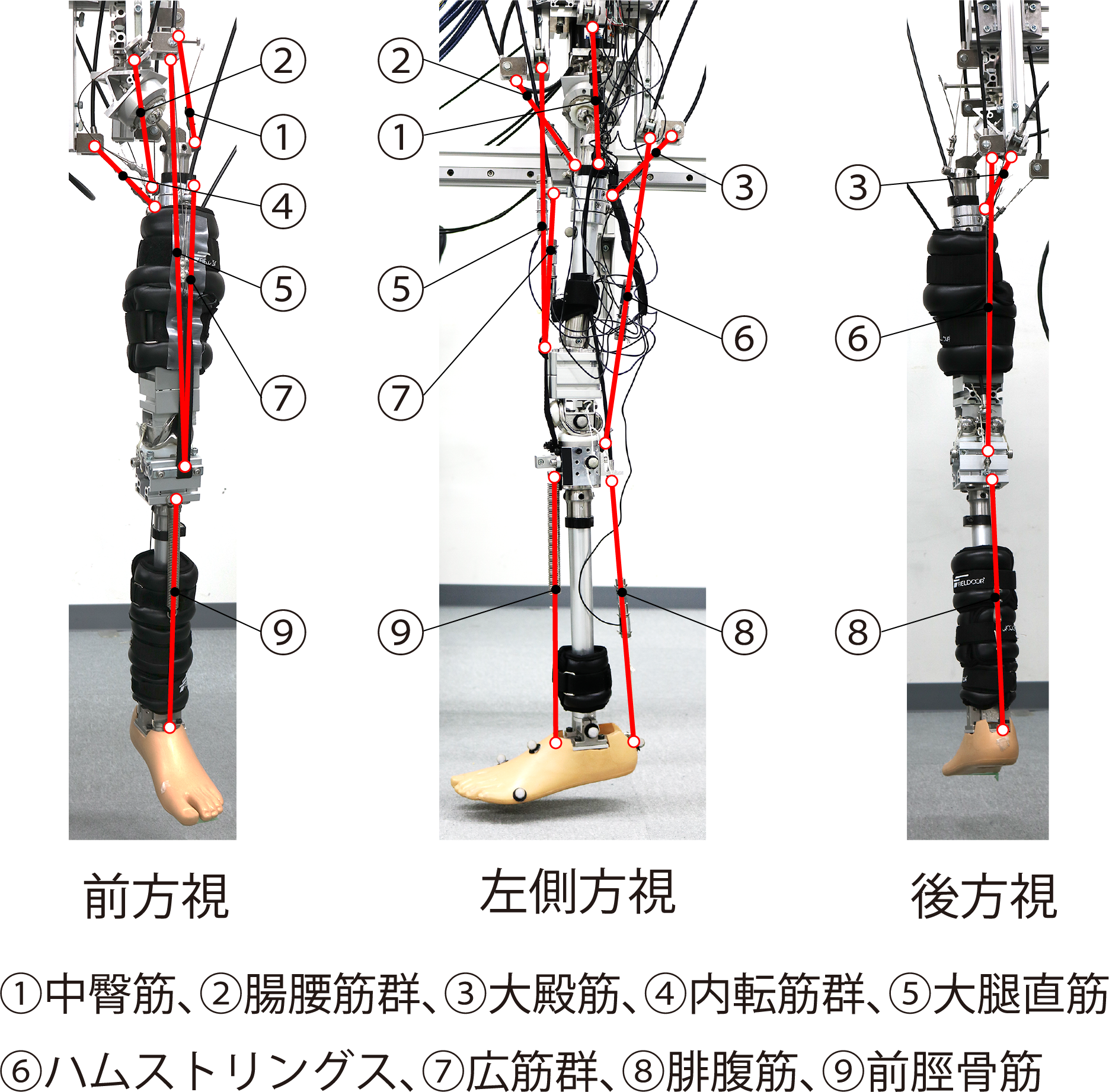
ヒトの下肢解剖学を再現したシミュレータであり,筋に模したワイヤにより動作時の筋張力を骨格部に伝達することができる.
関節部は人工関節が取り付けられているため,モータなどにより関節を駆動することはできない.
人工関節の直上・直下に6軸の力覚センサが取り付けられており,動作時の荷重を計測することができる.
人工関節の運動を直接計測でき,その時の力学状態も同期して計測できることから,
ヒトを対象とした計測では不可能な実験が可能となる.
|
|
|
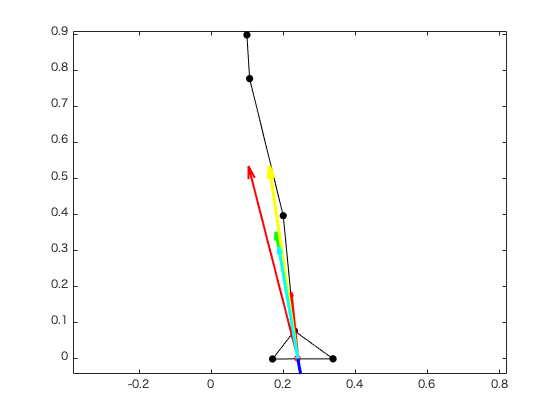 |
足部先端に発揮できる力(Functional Effective Muscle Strength)
モータ駆動型のロボットと異なり,筋を模したワイヤ制御では足部先端(つま先)における力の発揮力が姿勢と共に変化する.
下肢の姿勢と筋の解剖学的3次元走行との関係から,つま先部で発揮できる力を推定することができる.
これは機能的有効筋力(Functional Effective Muscle Strength)という.
こちらの図は,この姿勢において各筋が発揮できる力の方向を図示したものである.
筋の走向が3次元的であるため,力の方向も3次元的となる.
|
|
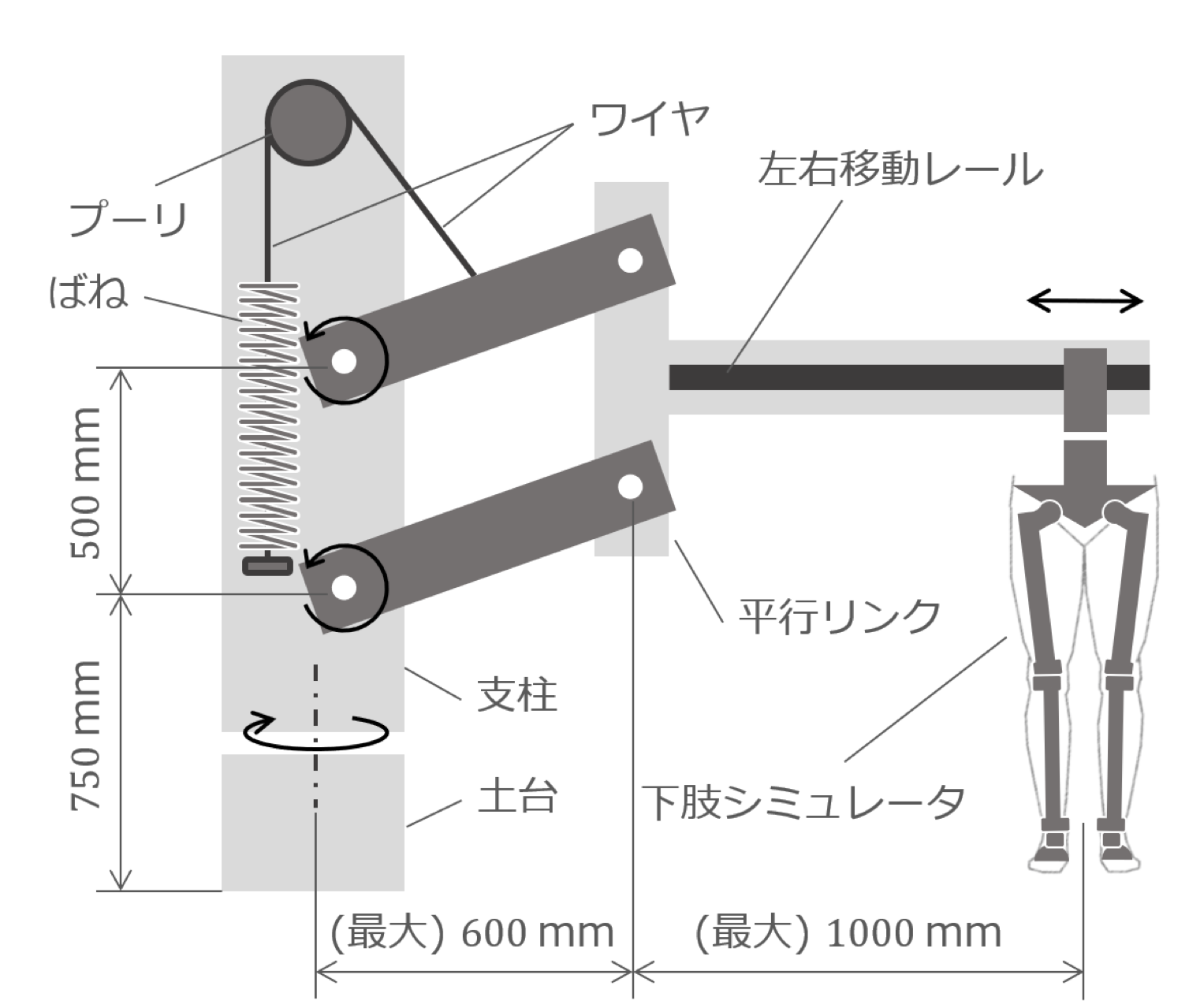 |
骨盤位置・姿勢制御リフターの原理図
筋骨格下肢シミュレータの運動基点となる骨盤位置とその姿勢を制御するために,
骨盤位置・姿勢制御リフターを開発した.
骨盤部の空間位置と運動に伴って変化する姿勢を制御できる一方,
シミュレータの重量を支えつつ並進・回転運動を行う必要がある.
このリフターでは,シミュレータの自重を支えるために,機械式自重補償器を用いた.
機械式自重補償器は,リフターの幾何形状に合わせて調整してあるため,
リフターの姿勢変化に依らずシミュレータを持ち上げることができる.
一種の無重力装置でもある.
|
|
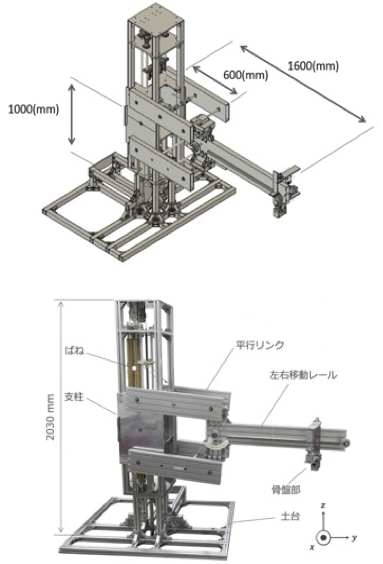 |
骨盤位置・姿勢制御リフター
骨盤位置・姿勢制御リフターのCAD図面(上)と,実際に開発したリフター(下).
シミュレータを支えながら,骨盤の空間中の位置・姿勢を制御できる.
歩行を前提とし,立脚期前後の1.5周期分の運動空間を実現できる.
また,方向転換やサイドカット動作など左右方向の移動を実現できる
|
|


