HOME
HOME メンバー
メンバー Link
Link Sponsorship
Sponsorship
![]()
研究室概要。
顕微鏡下での受精作業や被災地の救援活動などの複雑な作業を,人間がロポットを操作しておこなう場合,人間がロボットをより直感的に直接操作できるシステムが必要となります.ヒューマンインターフェースは,機械(ロボット)と人間が協調して目標を達成するために必要とされており,21世紀のロボット社会において重要な技術のひとつであります.本研究室では,画像処理技を基盤としたヒューマンインターフェースをもちいて,マイクロロボットの開発,レスキューロボットの開発,技能継承のための熟練技術の動作認識などのテーマについて研究をおこなっています.
![]()
拡張現実をもちいた顕微作業支援システム
近年, MEMS技術などの発達により各種マイクロ部品が製作されるようになったが,それらを構成するマイクロパーツの操作技術・環境の開発は十分といえないのが現状である.そこで,我々のグループでは,マイクロパーツの組み立て技術について,パーツのハンドリング技術[と,作業者の組み立て作業を支援する手法について検討をおこなっきた.本研究では,コンピュータ上で表現されている情報をカメラなどから取得した現実世界の情報を元にしてあたかも現実世界にあるように見せる技術であるAR技術をもちいて,顕微鏡下で微細部品を組み立てる作業を支援するシステムの開発をこない,その性能の有効性について検討をおこなっている.
インタラクティブインターフェスを用いた学習支援システム
昨今,様々な理由により,学校における理科教育が不十分であり,日本の科学リテラシーも低下している.特に,実験や観察などの, 理科の本質である現象の体験から学ばなければ,想像力,応用力の低下を促し,しいては日本を支えるものづくりの力の低下が危ぶまれる.本研究では,教師が教えにくく,生徒も理解しにくい,電場や重力場などの「場」の概念について,生徒が体験的に学習できる Tangible bitと,視覚的なアウトプットを備えた学習教材(インタフェースと学習コンテンツ)を開発する.
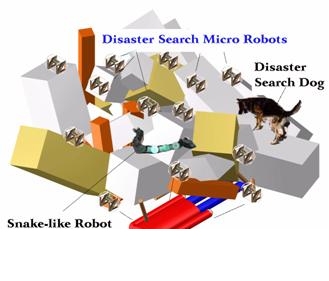
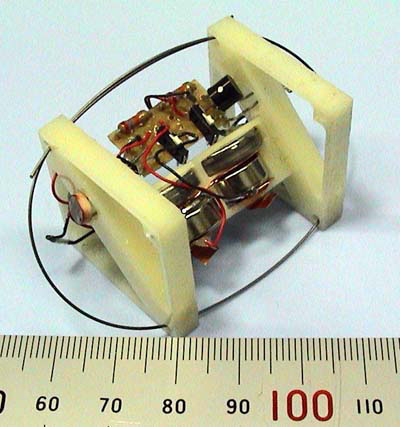
都市型災害における小型探査レスキューロボット
現在,ロボット技術の発展により,様々な研究機関でレスキューロボットの研究が盛んに行われている.しかし,それらの多くのロボットは,災害現場に対応するために,高価なアクチュエータやセンサ等を大量に使用し,ロボットの大型化・複雑化・コストの高騰を招いており,高機能ではあるが実際に実用化されたことは多くない.従って,この研究テーマでは,被災者の早期発見に焦点を合わせ「小型・単純・安価」をコンセプトとし,実用に耐え得るロボットを研究する.
(財団法人JKA 競輪補助事業の補助により研究をおこなっております。)
平成23年度プロジェクト
平成24年度プロジェクト
平成25年度プロジェクト
![]()
研究室
新宿キャンパス18階
実験装置(作成中)
- コンピュータ(windows & Mac)
- 3D CAD
- モデリングマシン
- 倒立顕微鏡
- 精密ステージ
- ズームレンズカメラ
- 各種電子パーツ
- オシロスコープ
 |
|
|
|  |  |