映像水中光伝送の研究Underwater Optical Video Transmission
研究の目的

研究のねらい
本研究の目的は潜水艇など海中からテレビ生放送をすることです。海中では電波の減衰が大きく音声程度しか伝送できません。可視光は電波と比べると減衰は小さいものの、浅い水深では散乱による大きな減衰を受けるため海上との長距離伝送は困難です。近年の撮像技術の進展により、ダイオウイカなど深海の未知の生物を茶の間で見ることができるようになりました。しかし伝送技術がないため、撮影した映像を記録装置に保存して持ち帰る必要があり、浮上して再生するまでに多くの時間を要するという課題があります。
伝送手段
リアルタイム伝送を行うのには図1(a)のように海上と潜水艇とを光ファイバで結べば良いと思われるかもしれません。しかし、これでは潜水艇の行動が制限されたり、ケーブルが切れる恐れがあります。かといって、図1(b)のように可視光で直接伝送するのは可視光の損失が電波よりも十分に小さいといっても光ファイバと比べると1000倍も大きいことや、水深の浅いところで減衰が大きいことを考えると現実的ではありません。
そこで、潜水艇の近くに中継器を置き、潜水艇から中継器までの短い距離を可視光で伝送し、中継器から海上までの長い距離を光ファイバで伝送する方法を提案しました。
深海への興味が高まる昨今、海中からの伝送を実現する技術開発には大きな意義があります。また、本方式が実現すれば、東日本大震災で変化した海中の地形の様子リアルタイムに観測できるようになるなど、放送以外の分野にも展開が可能と考えます。
リレー中継方式による伝送システムの提案
光空間伝送システムに共通の課題のひとつに「光を相手にうまく当てる技術の開発」があると思います。光は直進性が強いので送受信間がうまく繋がれた状態であれば高い伝送性能が得られます。しかし、人が潜ることができない暗い海のなかで、通信相手を先ずどのように探せるのでしょうか? また、光ビームが相手から外れそうになったらどのように制御するのでしょうか? そこで私達は光ビームの位置ずれを検出する機能に重点を置いて研究を進めています。
再帰性反射材の利用
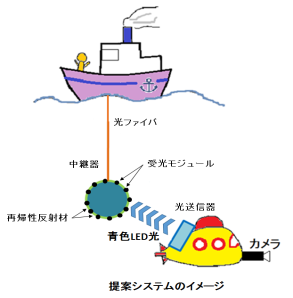
提案する伝送システムのイメージを図2に示します。潜水艇も中継器も動き回るのが前提なので、中継器はどの方向から光が来ても受信できるように球形にしてあり、表面には受光モジュールを等間隔で配置しています。中継器の受光モジュール以外のところは再帰性反射材というシートでまんべんなく覆われています。再帰性反射とは通常の反射とは異なり、光源から来た光がそのまま光源方向に戻る反射のことです。再帰性反射材を貼ったジャケットや道路標識は夜間にヘッドライトを当てると遠くからでも見つけることができます。夜間に高速道路を走っているときに、どの車線を走っていても道路際にある道路標識を同じように検知できます。これは、ヘッドライトの光が再帰性反射材で反射されて運転席に戻るからです。
再帰性反射材を貼った球形の中継器であれば、暗い海のなかでも、潜水艇から見つけやすいだろうと考えました。
システム構成
ただし、これだけだと光ビームがずれたときに光送信装置の送信基板をどのように制御すれば良いのかがわかりません。そこで、位置ずれ検出用のトラッキング信号を用います。光送信基板は平面状に配置した複数のLEDで構成し、映像信号をLEDに分配して光の強度を変調します。一部のLEDにはトラッキング用の正弦波で光の強度を変調をします。正弦波によって位置ずれの方向と程度を検出する動作原理を簡潔に説明するために光送信基板にはLEDを3個とPDが2個あるとして図3で説明します。LED1と3でトラッキング用の正弦波を、LED2で映像信号を送ります。中継器での受光モジュールで受信された信号のうち、映像信号は合成された後に、光ファイバを用いて洋上の船に送られます。
再帰性反射材に届いた送信光は、送信基板に反射されます。LED1から出た光はLED1のすぐ近くのPD1で、LED3から出た光はPD3で受光されます。中継器の上ではふたつの光は重なりますが、反射光はそれどれのLEDのすぐ近傍に集まり、別の光源のところには行きません。そこで、PD1とPD3の正弦波の電力を比較すれば、中継器が光ビームに対してどの方向にどの程度ずれているのかを知ることができます。

位置ずれ検出原理
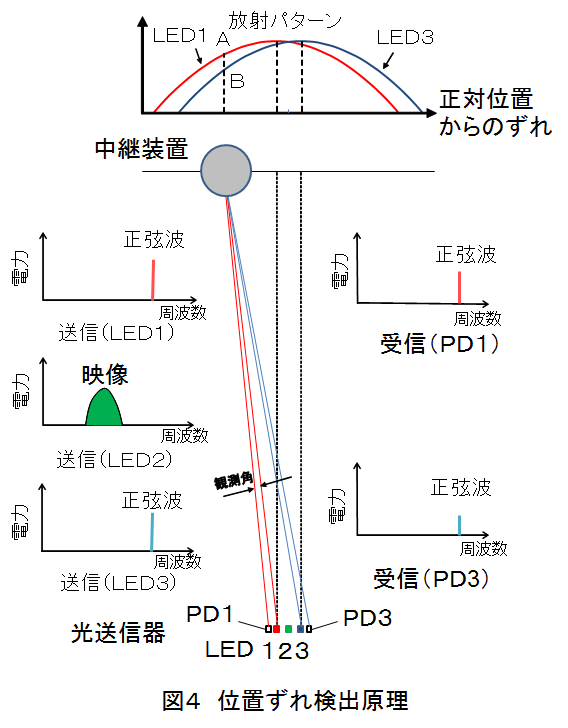
位置ずれ検出原理を図4で説明します。LEDの放射パターンはLEDの正面で最も大きくなります。LED1と3の放射パターンは赤色と青色で示すように同じ形ですが、ふたつのLEDの距離だけずれています。今、中継器が図のように左側にずれている場合には、中継器においてLED1による光強度はA、LED3のよる光強度はBで、AはBよりも大きいことが分かります。図の左側にはLED1、2,3から送信される信号のスペクトラムを、右側にはPD1とPD3に得られる正弦波のスペクトラムを示します。PD1の正弦波電力はPD3よりも大きいので、両者の強度を比較することで、中継器がどちらにどの程度ずれているのかが分かります。
この方法は、正弦波の強度を比較するという単純でありながら高感度な検出ができる特徴があります。誤差信号などで変調をしないので受信機に極めて狭い帯域幅のバンドパスフィルタを用いることで高感度な受信ができます。
受信モジュール
今度は中継器における光の受信効率について図5で考えて見ます。中継器はどの方向から光が来てもいいように球体とし、表面には多数の受光モジュールを配置しています。このとき(a)のように受光モジュールが外に向いていると送信光の方向に向いている青色の受光モジュールと比べて、その周辺の受光モジュールの受光モジュールは良くありません。そこで、これらの受光モジュールを機械的に光の来る方向に向かせることで受信品質の向上を図ります。このような制御をするには光の到来方向を知る必要があります。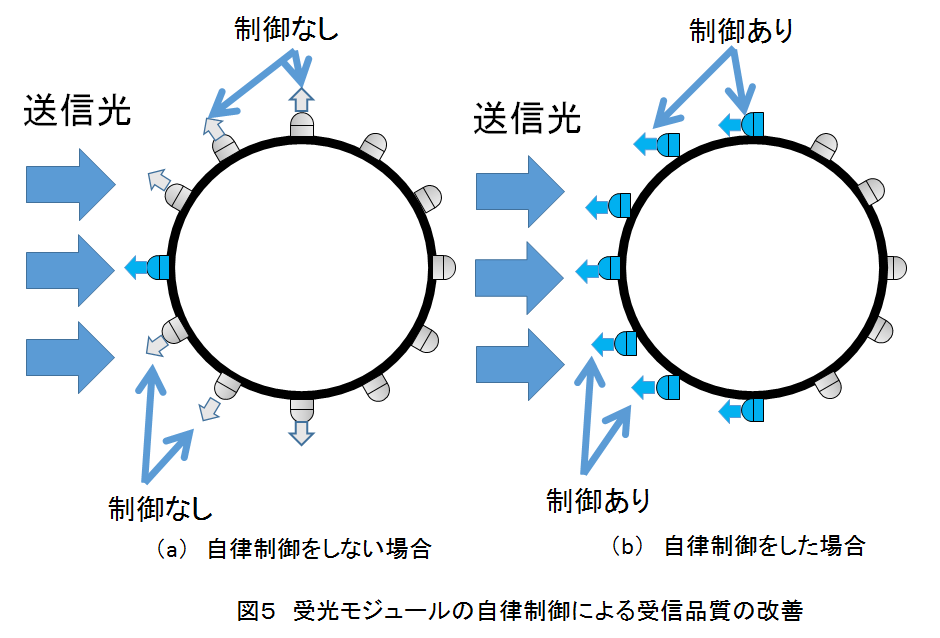
光到来方向検出原理
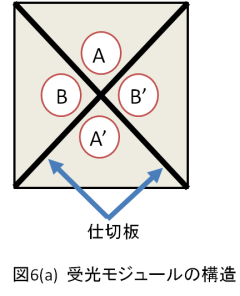
受光モジュールを上から見た図を図6(a)に示します。受光モジュールは上下方向検出のためのA、A’、および左右方向検出のためのB、B’の4個のPDで構成します。お互いのPDは仕切り板で隔てられています。
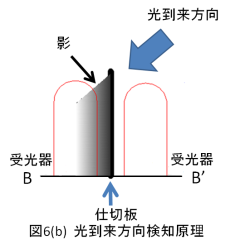
図6(b)のように光が正面よりも右側から来るようになったとします。すると、仕切り板によって影ができるため、受光器B’は受光器Bよりも受光電力が大きくなります。
従って、両者に得られた位置ずれ検出用の正弦波をここでもバンドパスフィルタで抜き取った後に電力を比較し、その結果でサーボモータを動かしてやればよいことになります。
従って、両者に得られた位置ずれ検出用の正弦波をここでもバンドパスフィルタで抜き取った後に電力を比較し、その結果でサーボモータを動かしてやればよいことになります。
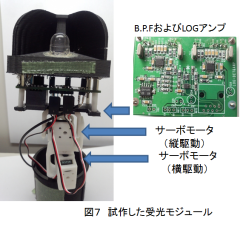
試作した光モジュールを図7に示します。一番上が仕切り板の入った受光器のある場所です。4個のPDのうち1つだけが見えています。広角度の検知ができるように、PDは平面に垂直にではなく、半値角に相当する22.5度傾けた面に図のように若干外向きに設置しています。
その下には2枚の基板が重なっています。1枚目はPDのプリアンプ基板で、2枚目はBPFおよびLOGアンプです。この出力で縦駆動と横駆動のサーボモータを動かします。
その下には2枚の基板が重なっています。1枚目はPDのプリアンプ基板で、2枚目はBPFおよびLOGアンプです。この出力で縦駆動と横駆動のサーボモータを動かします。
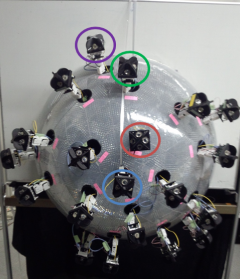
この光モジュール20個を再帰性反射材を貼った半球に一様に配置したところです。半球の頂点である青色の丸で囲った受光モジュールの方向から平行光を当てる実験を行いました。
そしてこの光モジュールから得られる正弦波の電力を赤色、緑色、紫色で囲った光モジュールから得られる電力と比較しました。
そしてこの光モジュールから得られる正弦波の電力を赤色、緑色、紫色で囲った光モジュールから得られる電力と比較しました。
自律制御実験結果
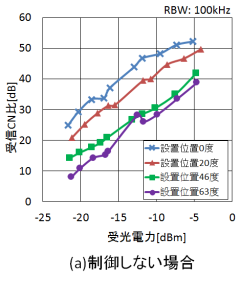
4個の受光モジュールで得られた正弦波の受信CN比を受光電力を変化させて測定しました。その結果を(a)に示します。この図から半球の頂点(設置位置0度)にある光モジュールでは最も大きなCN比が得られおり、設置位置が大きくなるにつれて受信CN比が小さくなることが分かります。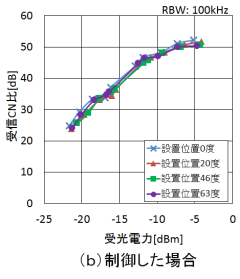
次に光モジュールを自律制御させた場合の受信CN比を(b)に示します。この図から、設置位置20度、46度、63度にある光モジュールのCN比が、自律制御をすることにより0度と同じ値まで改善されることが分かります。
バナースペース

全てLEDのイルミネーション
前田研究室
〒163-8677
東京都新宿区西新宿1-24-2
工学院大学工学部
電気システム工学科
新宿キャンパス2212号室